연구/산학
PKNU Research 1000
| Seo Jin-Ho | Received the best paper award for their research on 'snake robot' control | |||
| 작성자 | 대외협력과 | 작성일 | 2024-06-14 |
| 조회수 | 24254 | ||
| Seo Jin-Ho | Received the best paper award for their research on 'snake robot' control | |||||
 |
대외협력과 |  |
2024-06-14 |  |
24254 |
Prof. Seo Jin-Ho's team at PKNU received the best paper award for their research on 'snake robot' control
- presented at the Korea robotics society annual conference, increased the usability of snake robots
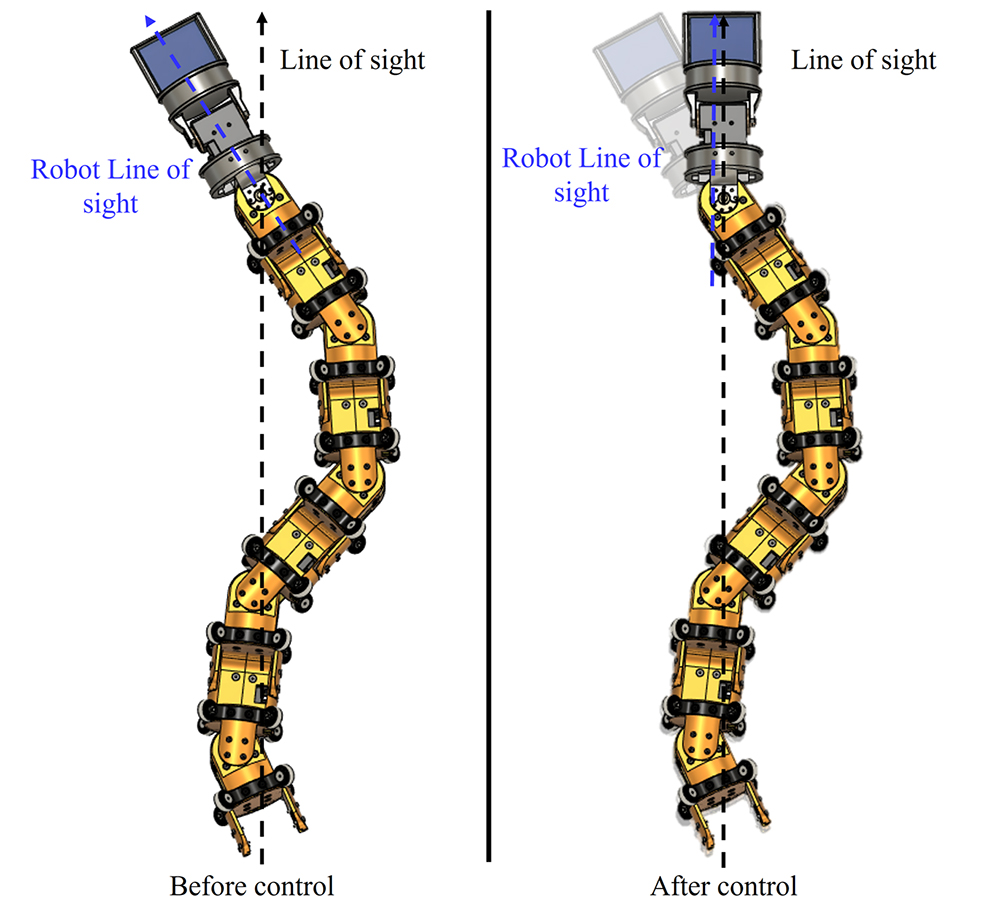
△ The concept image for head control of a snake robot.
The research team led by Professor Seo Jin-Ho (mechanical systems engineering) at Pukyong National University announced that the team won the best paper award at the 19th Korea robotics society annual conference (KRoC2024).
Professor Seo Jin-Ho's team received an excellent evaluation in the poster category for their paper 'research on I-PID-based snake robot head control using RBF neural network and robust control' at this academic conference held at Phoenix Pyeongchang from the 21st to the 24th of last month.
The Korea robotics annual society conference is Korea's largest robot-related academic conference jointly held by the Korea robotics society and the Korea robot industry promotion institute to share various engineering knowledge in the robotics field and expand the academic field related to robots.
In this study, the research team presented an effective head control method for a snake robot used for purposes such as exploring narrow spaces using RBF neural network, an artificial intelligence technique, and robust control, which is one of the theories for controlling uncertainty in the system.
The research team suggested a strategy to independently control the joints of the snake robot's head and revealed a method to minimize camera shake that occurs while driving the snake robot through robust control combined with an artificial neural network.
Professor See Jin-Ho said, "I expect that our team's research will be used as basic research to increase the usability of snake-shaped robots as mobile robots."